ヒトの手指の完全なコピーは作れるか?
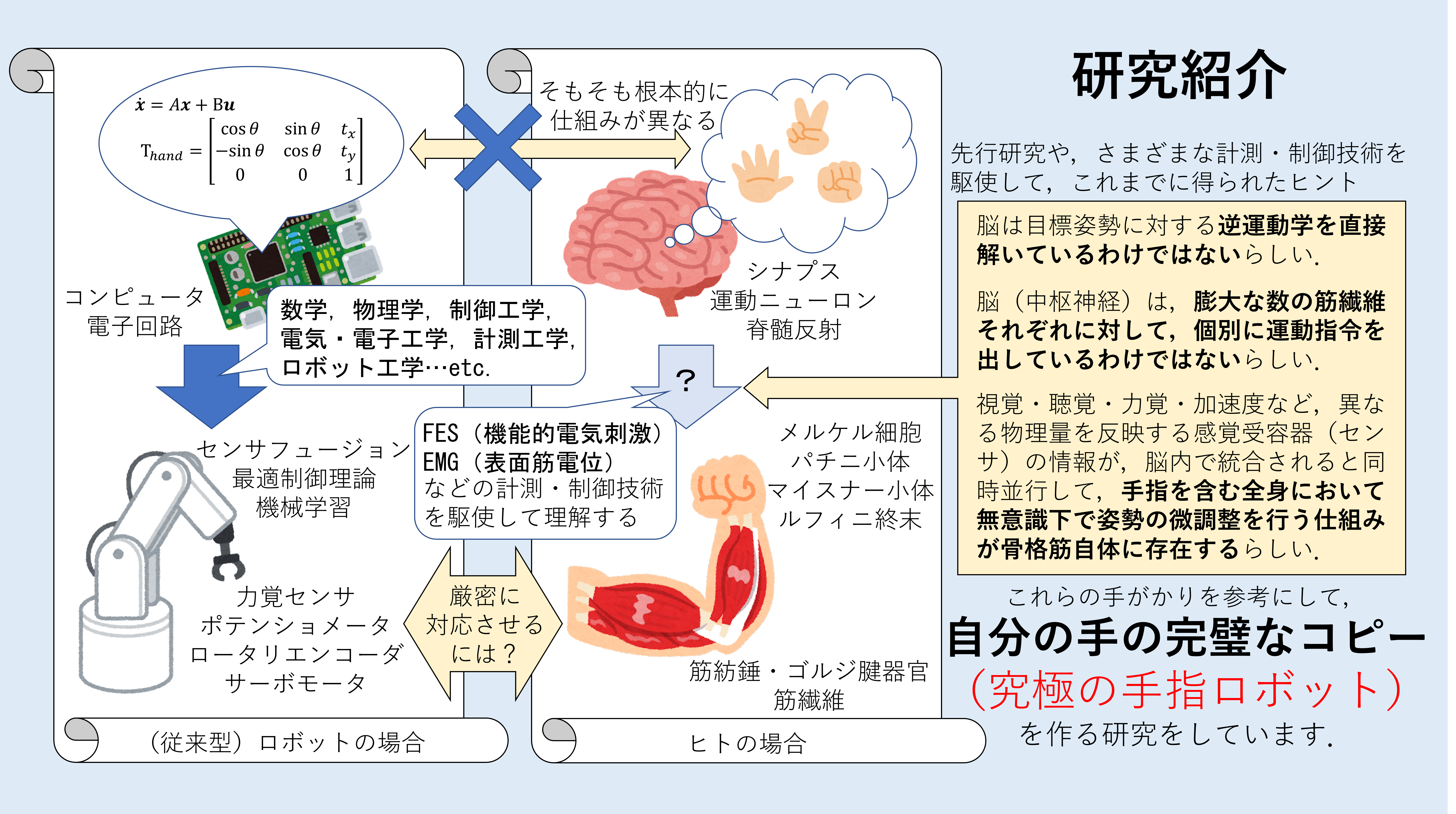
ロボット工学の視点から見ると、健常なヒトの手指は非常に高度なセンサとアクチュエータが密接に融合した素晴らしいデバイスです。これと全く同じもの…単に形や動きなど外見に留まらず、ものに触れた時の感触を知覚することもできるような完璧な手のコピー…を人工的に作るには、どうしたら良いでしょう?そもそも、私たちが普段何気なく自分の手を動かしている仕組み…脳から神経を通って筋肉に信号が伝わって…という大雑把なことは古くから知られているものの、より具体的に、沢山の筋に対して脳がどのように運動指令を出しているのか?という詳しいメカニズムは、実はまだ誰も確実な答えを知りません。しかし、機能的電気刺激(FES)や表面筋電位(EMG)計測などの技術を駆使しながら調べていくと、私たちの脳や中枢神経は、産業用ロボットハンド等とは全く異なる原理に基づいて、全身の筋肉を巧みに制御しているらしいことが少しずつ分かってきました。これを手掛かりとして、新しいロボットの駆動メカニズム(アクチュエータ)や制御アルゴリズムを研究開発しています。