講義・実験
Lecture/Experiment
Curriculum
カリキュラム
情報科学部では、学位授与の方針(ディプロマ・ポリシー)および卒業研究の内容等に基づいて、学士(情報科学)と学士(情報工学)のいずれかの学位を取得できます。学位授与の方針を達成するために、カリキュラムが編成されています。
システム工学科で学べる代表的な科目を下に示します。幅広い分野の学問を学べるのが、本学科の特徴です。
| 所属 | 年次 | 授業科目 | ||||
|---|---|---|---|---|---|---|
| 専門教育科目(専門基礎科目) | 専門教育科目(専門科目) | 外国語系科目 | ||||
| 情報科学部 |
1年次 |
|
|
|||
|
2年次 |
|
|
|
|||
|
3年次 |
|
|||||
□3年次後期に配属先の講座決定人間・ロボット共生講座/数理システムデザイン講座/インタフェースデザイン講座 |
||||||
|
4年次 |
|
|||||
| 情報科学研究科 | 前期 |
38科目(必修4科目) | ||||
後期 |
12科目(必修2科目) | |||||
※2年次進級と同時に4学科のいずれかに配属されます。
※3年次後期に3つの講座のいずれかに配属されます。イノベーション人材育成プログラムに参加している学生は、本人の希望により、優先的に3年次前期に配属され、後期に変更することもできます。
卒業要件、各学年への進級要件、教育課程表、教育職員免許状の取得方法は、「学修の手引き」に記載されています。
各講義の内容は、シラバスに記載されています。
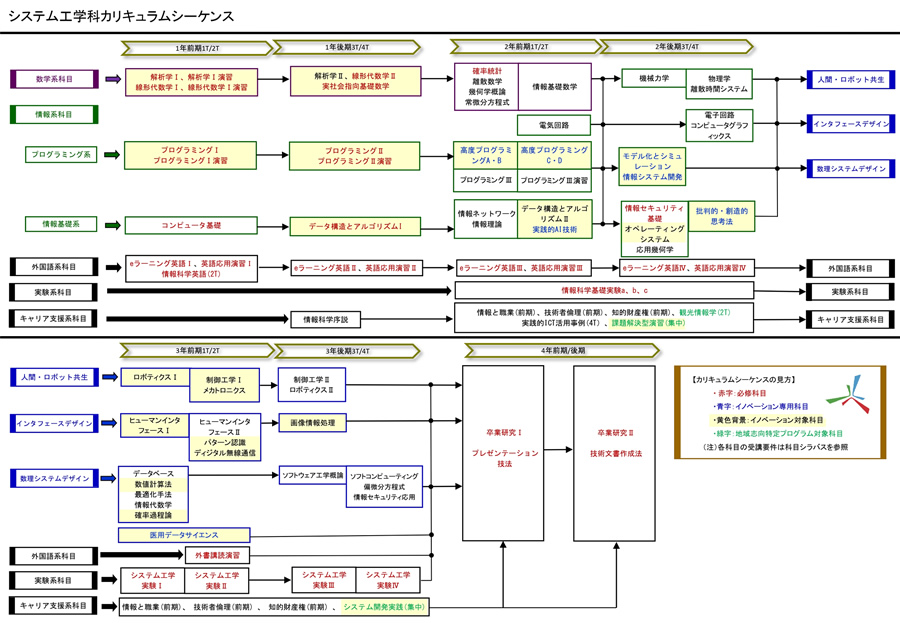
カリキュラムシーケンス(2023年度入学生)
学年が上がるにつれて、講義内容は細分化され、より専門性の高いものになっていきます。また、多くの講義で、低学年で学んだ知識を前提に授業が展開されます。カリキュラムシーケンスは、どのような順序で講義を受講すれば、効率よく学習できるか示しています。
System engineering experiment
システム工学実験
3年次に開講され、1年を4期(実験Ⅰ~Ⅳ)に分けて、走行ロボットを作り上げていきます。2~3名で一つの班を組み、協力し合いながら段階的にロボットの機能を実装していきます。最後にVR空間上でロボットを制御する班対抗の対戦コンテストを行います。
システム工学実験Ⅰ
ロボットのモータ制御と遠隔制御について実験します。ロボット駆動プログラムを作成し、センサ出力を利用して、ロボットの速度を制御できることを目指します。また、ソケット通信などのネットワーク技術を学び、ロボットを遠隔制御できるようにもなります。
システム工学実験Ⅱ
ジェスチャ指示によるロボットの制御システムや、障害物を検知・回避するロボットを構築します。時系列データ認識処理を学び、人のジェスチャ指示に従って動作するロボットを構築します。また、機械学習技術を用いて、障害物を検出・回避するロボットを構築できるようになります。
システム工学実験Ⅲ
音声指示によるロボットの制御システムや、仮想GPSを用いたロボットの測位システムを構築します。音声認識の基礎を学び、人が発した単語からロボットを制御できるようになります。また、仮想GPSのソフトウェアの実装を通して、ロボットの位置を測位するためのシステムを学びます。
システム工学実験Ⅳ
VR空間上でのロボット制御実験を行います。現実世界のロボットの動作とVR空間のロボットの動作を一致させる技術について学びます。また、VR空間上のロボットで対戦するコンテンツを実装し、実際にグループ同士での対戦を行います。

